智能垃圾分类系统(负责人)
2021.6 - 2021.8K210 视觉+深度学习实时识别 + STM32F103 协同调度,驱动舵机与语音播报,实现高效多模态智能垃圾分类。
项目概况
系统采用「K210 视觉推理 + STM32 主控调度」的双 MCU 协同架构:K210 负责摄像头图像实时采集与垃圾种类深度学习识别;STM32 处理动作逻辑、舵机开合、传感器状态与语音提示,形成快速、准确、可交互的垃圾分类终端。
系统架构
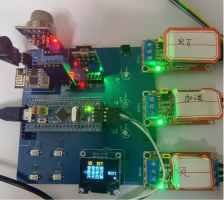
- 识别单元:K210 + 摄像头,内置神经网络加速引擎,部署轻量分类模型(纸/塑料/金属/其它)。
- 主控调度:STM32F103 串口接收分类结果并执行控制策略。
- 执行机构:SG90 舵机驱动多分类桶盖精准开合(PWM 控制角度)。
- 检测感知:红外传感器判定投放有效性,避免空转。
- 交互反馈:OLED 状态显示 + LX_TRIG_MP3 模块语音播报分类结果。
- 供电模块:稳压分组供电,隔离噪声保障推理与舵机动作稳定。
核心流程
- 投放检测:红外感应 -> 触发图像采集。
- 分类推理:K210 模型前向推理输出类别标签。
- 结果传输:UART 将类别编码发送至 STM32。
- 动作执行:STM32 计算目标桶位 -> 产生 PWM -> 舵机开盖。
- 语音与显示:OLED 同步状态,语音模块播报结果与提示。
- 闭环复位:延时/状态确认后复位桶盖等待下一次投放。
技术亮点
- 推理与控制解耦:视觉高负载与实时执行分离,降低互扰。
- 轻量模型部署:利用 K210 KPU,端侧实时分类低时延。
- 多传感融合:视觉 + 红外触发减少无效识别,节能提效。
- 模块化扩展:串口协议抽象,可替换/升级模型或拓展新类别。
- 交互完整:语音 + 可视化 + 机械动作形成闭环体验。
性能与效果
- 单次识别-执行全流程延迟:≈1.2s(含机械动作)。
- 识别准确率:四分类实验数据集测试 >92%(样本集内部测试)。
- 连续运行稳定:长时间循环测试无死机与串口阻塞。

K210视觉垃圾分类识别项目
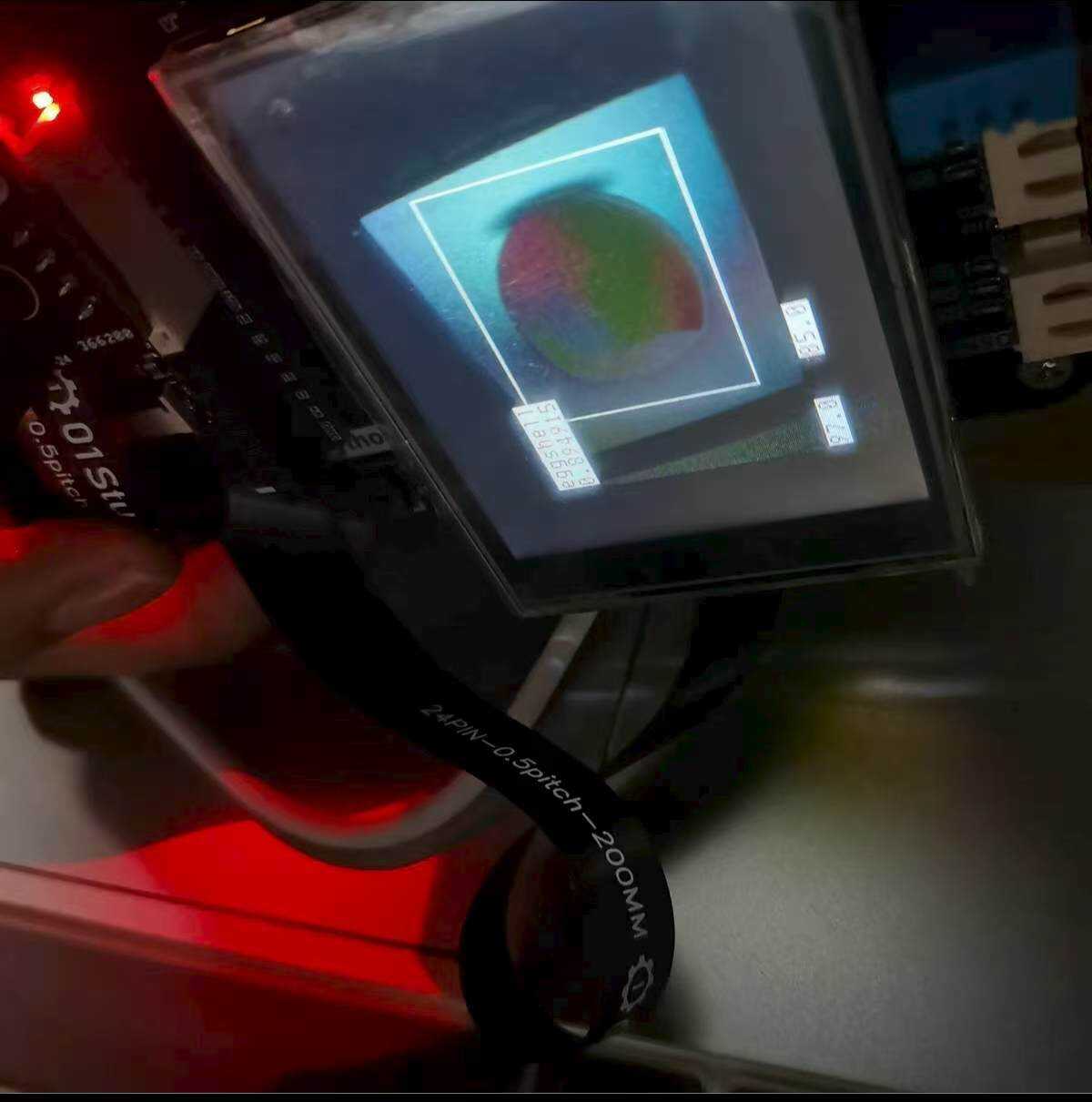
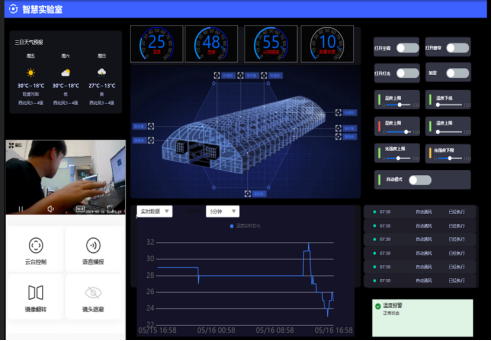
垃圾分类系统识别界面

K210控制模块
语音分类演示
.png)



.png)

+全国总决赛二等奖.jpg)



_01.png)